


测试电池以及所有电源组件和保险丝,ABB机器人维修检查装置是否有任何松动的连接,修复图表记录器的下一步是为设备供电并将故障排除到组件级别,进行维修并根据需要更换部件,维修提供输入电源,检查输入和输出,还检查控制电路和微控制器,设备设置为出厂默认输入信号,如4-10毫安,热电偶,RTD或压力传感器,后一步 - 验证图表上的输出,以确保它符合制造商的规格,断路器维修流程:通过将设备置于打开位置并检查触点的正确闭合来开始断路器维修。

机器人保养定时清洗机械手底座和手臂;可运用高压清洗设备,但应防止直接向机械手喷射;假如机械手有油脂膜等维护,按要求去除。防止运用塑料维护、为防止产生静电,有必要运用浸湿或湿润的抹布擦拭非导电外表,如喷涂设备、软管等。请勿运用干布。根据实际情况,中空手腕需求经常清洗,以防止灰尘和颗粒物堆积,用不起绒球、洁净的布料进行清洁,手腕清洗后,可在手腕外表增加少量凡士林或相似物质,今后清洗时将更加便利。

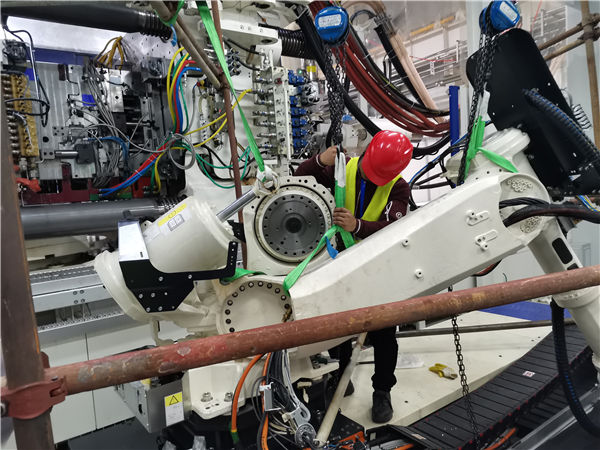
机器人手臂的日常维护是非常重要的。具体有以意事项:机械手导轨及轴承。机器人应保持所有轴的导轨和轴承清洁并保持良好的润滑。如果机器人在尘土飞扬的环境中运行,轨道需要经常清理。如果您发现任何金属碎片或粉末,这可能表明润滑不良。为了保证适当的润滑,关键是要有正确的线性制导系统。定制润滑系统及需要定期更换的零部件,可根据客户要求定制。






 在线客服
在线客服 18842585256
18842585256 871198204@qq.com
871198204@qq.com